In this short NumPy tutorial, we are going to learn how to convert a float array to an integer array in Python. Specifically, here we are going to learn by example how to carry out this rather simple conversion task. First, we will change the data type from float to integer in a 1-dimensional array. Second, we will convert float to integer in a 2-dimensional array.
Now, sometimes we may want to round the numbers before we change the data type. Thus, we are going through a couple of examples, in which we 1) round the numbers with the round() method, 2) round the numbers to the nearest largest with the ceil() method, 3) round the float numbers to the nearest smallest numbers with floor() method. Note all code can be found in a Jupyter Notebook.
Table of Contents
- Creating a Float Array
- How to Convert a Float Array to an Integer Array in Python:
- Round the Float Numbers Before we Convert them to Integer
- Round to the Nearest Largest Integer Before Converting to Int
- Round to the Nearest Smallest Integer Before Converting to Int
- Conclusion
- Resources
Creating a Float Array
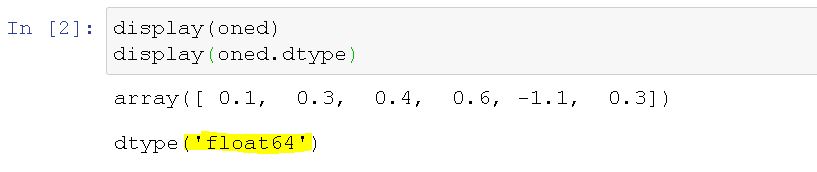
First, however, we are going to create an example NumPy 1-dimensional array:
import numpy as np
# Creating a 1-d array with float numbers
oned = np.array([0.1, 0.3, 0.4,
0.6, -1.1, 0.3])Code language: PHP (php)As you can see, in the code chunk above, we started by importing NumPy as np. Second, we created a 1-dimensional array with the array() method. Here’s the output of the array containing float numbers:
Now, we are also going to be converting a 2-dimensional array so let’s create this one as well:
# Creating a 2-d float array
twod = np.array([[ 0.3, 1.2, 2.4, 3.1, 4.3],
[ 5.9, 6.8, 7.6, 8.5, 9.2],
[10.11, 11.1, 12.23, 13.2, 14.2],
[15.2, 16.4, 17.1, 18.1, 19.1]])Code language: PHP (php)Note, if you have imported your data with Pandas you can also convert the dataframe to a NumPy array. In the next section, we will convert the 1-dimensional array to integer data type using the astype() method.
How to Convert a Float Array to an Integer Array in Python:
Here’s how to convert a float array to an integer array in Python:
# convert array to integer python
oned_int = oned.astype(int)Code language: PHP (php)Now, if we want to change the data type (i.e., from float to int) in the 2-dimensional array we will do as follows:
# python convert array to int
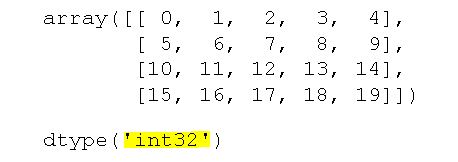
twod_int = twod.astype(int)Code language: PHP (php)Now, in the output, from both conversion examples above, we can see that the float numbers were rounded down. In some cases, we may want the float numbers to be rounded according to common practice. Therefore, in the next section, we are going to use around() method before converting.
Now, if we want to, we can now convert the NumPy array to Pandas dataframe, as well as carry out descriptive statistics.
Round the Float Numbers Before we Convert them to Integer
Here’s how to use the around() method before converting the float array to an integer array:
oned = np.array([0.1, 0.3, 0.4,
0.6, -1.1, 0.3])
oned = np.around(oned)
# numpy convert to int
oned_int = oned.astype(int)Code language: PHP (php)Now, we can see in the output that the float numbers are rounded up when they should be and, then, we converted them to integers. Here’s the output of the converted array:
- How to Perform Mann-Whitney U Test in Python with Scipy and Pingouin
- Python Scientific Notation & How to Suppress it in Pandas and NumPy
Round to the Nearest Largest Integer Before Converting to Int
Here’s how we can use the ceil() method before converting the array to integer:
oned = np.array([0.1, 0.3, 0.4,
0.6, -1.1, 0.3])
oned = np.ceil(oned)
# numpy float to int
oned_int = oned.astype(int)Code language: PHP (php)Now, we can see the different in the output containing the converted float numbers:
Round to the Nearest Smallest Integer Before Converting to Int
Here’s how to round the numbers to the smallest integer and changing the data type from float to integer:
oned = np.array([0.1, 0.3, 0.4,
0.6, -1.1, 0.3])
oned = np.floor(oned)
# numpy float to int
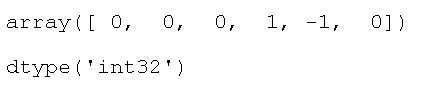
oned_int = oned.astype(int)Code language: PHP (php)The image below shows the results of using the floor() method before converting the array. It is, of course, possible to carry out the rounding task before converting a 2-dimensional float array to integer.
Here’s the link to the Jupyter Notebook containing all the code examples found in this post.
Conclusion
In this NumPy tutorial, we have learned a simple conversion task. That is, we have converted a float array to an integer array. To change the data type of the array, we used the astype() method. I hope you learned something. Please share the post across your social media accounts if you did! Support the blog by becoming a patron. Finally, if you have any suggestions, comments, or anything you want me to cover in the blog: leave a comment below.
Resources
- Coefficient of Variation in Python with Pandas & NumPy
- Python Check if File is Empty: Data Integrity with OS Module
- How to Read & Write SPSS Files in Python using Pandas
- Pandas Count Occurrences in Column – i.e. Unique Values
- How to Read SAS Files in Python with Pandas